

Chicken Coop automation using the Arduino platform
Authors Note: Even though the focus of this project is to automate a chicken coop door, the same system could be applied to many other…

Authors Note: Even though the focus of this project is to automate a chicken coop door, the same system could be applied to many other automation tasks such as a remote weather station or irrigation system control.

When the Covid hit we saw all sorts of supply chain instability. Our way of addressing this problem was to install a device that converts food scraps into eggs, aka chickens. We happened to be blessed to reside in area that has an abundant supply of predators (of the four legged variety), and would be prudent to setup a safe-space, for the egg production machines, I believe the technical term is “chicken coop”.
We setup the coop is a remote part of our property, and quickly discovered the need to automate the coop door, especially in the winter. Lock it up at night and open first thing in the morning. I researched a number of coop door systems; some were as simple as time clocks and relays, others were fairly complicated. As an engineer (and a long in the tooth hardware hacker), this looked like a great really opportunity to create a cool home automation project.
I made up a list of requirements and nice-to-haves.
Open and close coop door on sunrise/sunset
Optional remote-control of coop-door
Daylight simulation to encourage egg production in winter
Monitor coop temperature for possible heater or vent control
Be somewhat resilient to power failures.
First Pass
Initially this seemed like a fairly easy Arduino project. Looking around I came across lots of cool stuff online and constructed first prototype the Arduino Uno. It didn’t take long though for me to discover I was going to need a little more flash memory that the 32K in the base ATMega328. That is if I intended to code everything using C++ and the IDE.
Let’s see why. First off, We are going to need some form of reliable real time clock and some math libriaies to derive sunrise and sunset. Since the power from the utilities isn’t always reliable around here, I also need to build in some form of UPS/battery and do the right thing when it powers back up. Like reset the clock automatically. Most devices do this with by connecting to the Internet and pinging the Network Time Protocol (NTP) servers.
I happen to have Internet available near my chicken coop. Earlier on I had installed a IP few cameras in the yard, (remember the predators I mentioned) affording me a nearby Cat-5 drop in addition to abundant WIFI.
I decided to try hooking up an Ethernet adapter first. There are a few Arduino Ethernet add-on boards available and adequate code libraries. But in the end I wasn’t happy with the power consumption of the Ethernet devices. I might have to run on backup batteries for a few days during a power failure. To my surprise though, I discovered that the power consumption of WIFI was actually lower than Ethernet when using a ESP8266 module.
Sparkfun Artemis
After a few attempts at building the available libraries using the Arduino IDE I quickly hit the 32K flash memory limit. Sparkfun however had just introduced a Arduino compatible board with a similar footprint; the Artemis RedBoard. At about $20, this thing was really cool. Based on the Cortex M4 Apollo3 chipset, the Artemis sported 1MB of flash and 384k of RAM. But wait! There’s more, much more, including a second hardware serial port, built in realtime clock and a watchdog timer. On top of all that it runs as a 3.3v device and eats less 1 mA! Ok this is going to be fun.
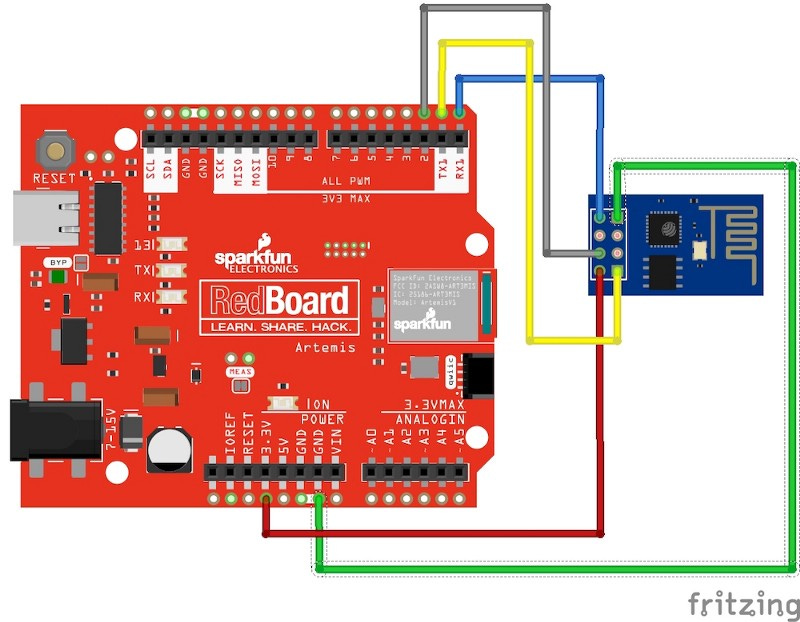
Given that I now have room to write some code, I decided to use one of the ESP8266 Wifi modules. You can pick them up for a few bucks all over the net. Although I highly recommend that you get one configured with the latest firmware you can find. Sparkfun happens to have an ESP8266 (4MB Flash) already setup.
The ESP8266 is hooked up to the hardware Serial1 port on the Artemis running at 115200 baud. It effectively functions as a Wifi Modem using the AT command set. The ESP8266 is fairly popular and I did find a few libraries, but I wasn’t totally happy with them and ended up writing some C++ code to simplify network communications. (See ESP8266Mgr and WifiParser.)
Qwiic Connect
One of the other reasons I chose the Artemis RedBoard is that it supported the Qwiic Connect System is a nice packaging of the I2C protocol. This makes it easy to get the rest of the hardware up and running quickly and there is a ton of devices available.
For this project I chose to integrate a Temperature Sensor, a pair of red and green LED indicator buttons a quad relay card. Here is a photo of the original layout.
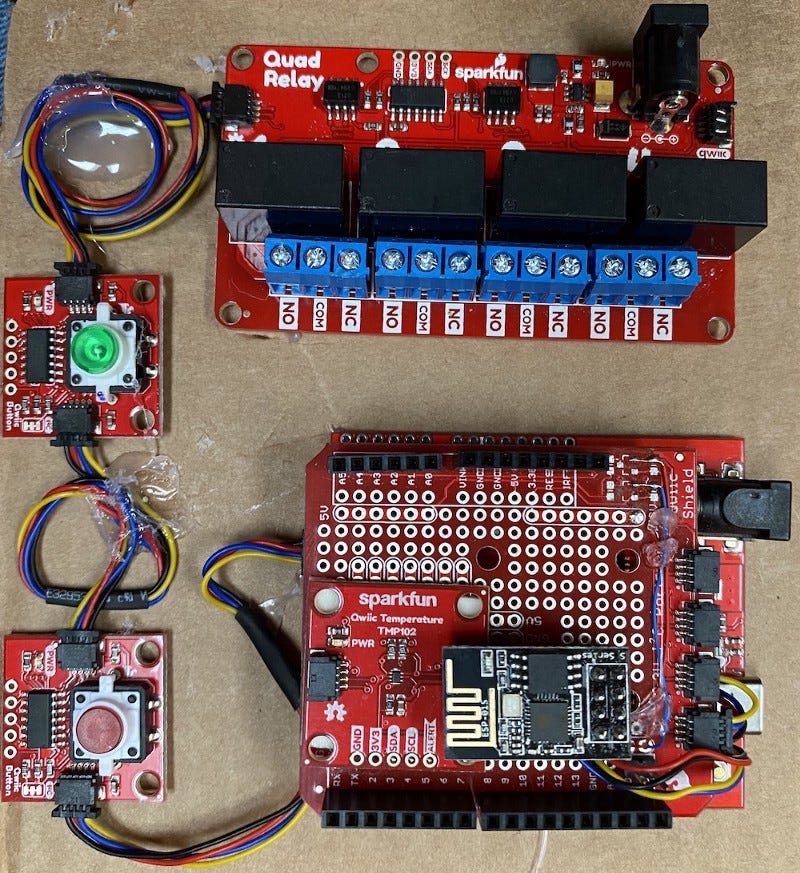
What you see on top of the Artemis is the daughter board that I use to mount the ESP8266. I used a Sparkfun Qwiic Shield which I modifying by removing the logic level converters (the Artemis was already running at 3.3 v). In all honesty I could simply daisy chain the I2C Qwiic devices, but I was debugging at the time and wanted to wire the bus in parallel. You don’t need to do it this way.
The buttons
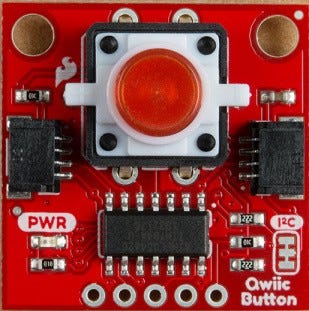
I really liked the Sparkfun Qwiic LED indicator buttons, They gave you solid tactile feedback and you can control the LED brightness and duty cycle. This was perfect for manual control of the coop door. I used green for open and red for close and blink the LED while the door was in motion.
Later I wrote an IOS app to talk to the controller and was able to use the same presentation.
Put it in a box
I added a Qwiic 20x4 LCD to help with debugging (it looked cool) and found a nifty battery that could act like a UPS Backup. I was able to mount all these cool goodies on a perf-board with some hot glue and screws and then fabricated a plexiglass cover to mount the buttons.
When I was done I put the entire project in a standard Irrigation Timer Box and mounted to the outside of the coop. These boxes are pretty common, not expensive and fairly weather resistant. You can remove the GFI receptacle and back plate if you want and even plug up the entry holes with a PVC plug using PVC pipe cement.

Door hardware
I constructed a simple sliding door using a piece of oriented strand board (OSB) and a set of side mount drawer slides. Chickens are not the smartest of creatures and a few times I found them loitering under the door while it was in motion. I really didn’t want go through the trouble of building logic to detect chickens and prevent the chicken-chopper effect. After a bit of experimentation I found a simple solution to the problem by employing a cable to hang the door from a linear actuator. I let gravity do the work. The door was not heavy enough to crush the chickens but once closed it was fairly difficult for a predator to slide up. If you needed a higher security solution, you could add a solenoid driven bolt on the lower part of the rail.

The door actuator
Electric linear actuators are basically DC motors that convert rotary motion to linear motion using a lead-screw assembly. Here is a great description of how these things work. I chose the Progressive Automations PA-14 Mini Linear Electric Actuator. It has a weather protection rating of IP54 which means it can get dirty and wet and still function well. It does use about 5 amps of current while opening and closing the door, but typically we only run for about 10 seconds twice a day. So even when running under battery power, that gives us a few days of action.
The PA-14 incorporates a built in set of limit switches. All we needed to do to operate it, is to run DC current though it one way to open and then reverse the polarity to close. A simple way to accomplish this is by using a pair of SPDT relays in an H-bridge configuration as illustrated in the diagram below. The actuator motor will spin one direction or the opposite depending on which relay is activated. This translates into up or down in our application.

If you wanted to save a bit more power, you could use a set of MOSFETs, and even save a few bucks on the relay board by connecting it directly to the Arduino digital I/O pins. One of my favorites is the NXP MC33883. Here is a example circuit. Just remember that the Artemis is a 3.3v device.
Power Management.
Earlier I mentioned that one of my design goals was to function a well I could during utility power failures. One approach to this is to power the entire system with a solar array and battery charger. Unfortunately the coop wasn’t in the best place for solar charging during the winter months. So I decide to rely on some form of UPS. I found an easy solution in this Shanqui UPS Battery Backup system. The device as shipped, consists of a bunch of standard 18650 Li-on cells rated at 2200 ma. This worked pretty well for me, though it wouldn’t take much to replace the cells with something better down the road.
One of the reasons I really liked the Artemis is that it can run as low as 6μA/MHz and the Sparkfun Redboard has a jumper that you can attach a current monitor to track both the Artemis and any of the devices power over Qwiic. This gives us the ability to try various power management strategies and see what really happens.
To start with, I removed the red power LEDs from the various Qwiic devices, once everything is working there is no need for them.
Another thing we can do is to determine if we are running on AC power or battery backup. Something like a INA219 could monitor the power charge current coming into the battery, or just check too see if there is voltage there with a simple opto-coupler like a EL817. There are lots of things we can do to change the behavior of our system when running on battery power alone. For example, we can assume if there is no AC power that our network is probably also not available, so we could shut down the Wifi. We could sleep the system and poll our devices a less often.
In addition we can also be a bit judicious about powering down some of the peripherals when they are not being used. For example, relays for the actuator only need to be activated when the motor is running. Even though the actuator has built in limit switch and wont use current when it hits the limit, the drive circuit does. At first I thought about hooking up a reed switch and magnet to detect the door position, but that seems like overkill. So I drive the open or close H-bridge relay for only the time it takes move the door ( about 10 seconds), and then shut it off. Maybe just keep one to detect the door close position, in case something jams the door.
Another use for the reed switches in on the enclosure door. If you look carefully at the photo of the enclosure above, you will see I glued a reed sensor to the lower right corner and a corresponding magnet on the door. And hooked up once side to ground and the other to one of the pin 6 of the Artemis digital I/O lines. Then you need to do is specify that it requires an input pull-up.
constexpr uint8_t pin_enclosureDoor = 6; // pin 6
pinMode(enclosureClosedPin, INPUT);
pinMode(enclosureClosedPin, INPUT_PULLUP);
if(enclosureClosedPin) ...We can tell if the enclosure door is open by testing the state of enclosureClosedPin and for example shut down the Qwiic buttons as well as the backlight to the LCD display to save some power.
The code and development environment
I posted the source code for the project on GitHub at https://github.com/vinthewrench/Coop2. It can be built using the standard Arduino IDE by clicking on the Coop2.ino sketch file. You need to do a little bit of setup of the board manager, but that is pretty easy and documented by the folks at Sparkfun.
I also created an Xcode project, because I liked that IDE editor, with a experimental makefile. My intent was to use the Arduino CLI or maybe platformIO (here is an experimental package for the Artemis), but I haven’t really had any success yet. Sparkfun had to do a lot hacking to get the Apollo3 SDK to work under the Arduino framework and at the tine of this writing the version 2 SDK wasn’t quite there yet.
So for now I suggest you use the setup the board manager as Sparkfun describes and use the Arduino IDE to compile and boatload the device. You can use any editor you want by checking the “use external editor” preference in the IDE.
Code Notes
At the top of the Coop2.ino file you will notice that I declare a number of classes to manage the various features.
WifiMgrwifiMgr;
APM3_RTC rtc;
TimeSyncMgr tsMgr;
EEPPROMMgr eeMgr;
ScheduleMgr scdMgr;
StateMgrstateMgr;
CmdLineMgrcmdLineMgr;
TelnetPortMgrtelnetPortMgr;
RESTportMgrrestPortMgr;
TempSensor tempSensor;
PowerMgr powerMgr;
Display display;
Buttons buttons;
Door door;This makes it fairly easy to separate the various features of this project. I will try and cover some of the more interesting functions.
Persistent Memory
Our project has some data that needs to be persist past a power failure and be restored on startup. For example, the Wifi SSID.
Luckily the Apollo3 chipset in the Artemis has a quite a bit of flash memory available for program use. Accessing it a low level is fairly easy using the Arduino Core EEPROM library. But to better manager the coop persistent data built an application specific class (EEPPROMMgr) on top it. I use it to store things like the Wifi SSID.
EEPPROMMgr eeMgr;
// have we initialized the prefs yet
if(!eeMgr.isSetup()){
eeMgr.clear_all();
// setup for first run
}
eeMgr.set_ssid("our wifi")The EEPPROMMgr also keeps track of information such as our timezone offset geo-location and preferred network time server. We will need those for sunrise and sunset calculations. In addition the EEPPROMMgr also maintains a list of scheduled events, such as when to open and close the door.
ESP8266 interface
I mentioned earlier that ESP8266 module use a serial interface and communicates using an extension of the old Hayes AT modem command set. While the ESP8266 AT commands can be used to set, query and test the Wifi device, it makes more sense to abstract the networking to a higher level. This is what the ESP8266Mgr and WifiParser classes do.
You can make higher level API calls like connectToAP, getAPList or openConnection and these classes will do all the protocol processing for you. This includes things like keeping track of link state and which ports are being used. While I did more than a few ESP8266 libraries for the Arduino, many of them were out of date, were not compatible with the Artemis or were not written to handle concurrent tasks. I plan to decouple the wifi code into a standalone test project and make that available on GitHub too.
Wifi Manager
The WifiMgr class is a even higher level API abstraction of the ESP8266 code and integrates in with other managers like the EEPROM code.
The WifiMgr creates an instance of the ESP8266Mgr and which in turn uses the WifiParser code. The WifiMgr is setup by handing it a pointer to which Serial device the ESP8266 is connected to as well as which digital I/O pin is connected to the ESP8266 chip power-down (CH_PD) pin.
The WifiMgr does the various calls the other managers to make things happen.
constexpr uint8_t pin_esp8266_reset = 2;
// Connect this pin to CH_PD on the esp8266
// hook up the wifi device
Serial1.begin(115200);
while (!Serial1);
// setup the wifi manager
wifiMgr.begin(&Serial1, pin_esp8266_reset);
// connect the wifi using previously setup EEPROM pref
wifiMgr.setAPConnection(true)
...
void loop() {
...
// DO periodic updates
wifiMgr.loop();
}Time Sync Manager
The job of keeping the realtime clock set and calculating the time of day as well as the next sunrise and sunset is handled by the TimeSyncMgr class. In addition to keeping track of the realtime clock state this class also encapsulates all the necessary network protocol code to set the clock with NTP. The TimeSyncMgr also encapsulates all the calculations required to figure when the next sunrise and sunset given the geo-location and time zone offset of our device.
TimeSyncMgr tsMgr;
// Setup Time Sync Manager
tsMgr.init();We can then check to see if the clock is set properly:
enum time_status {
TIME_NOT_SET = 0,
TIME_NEEDS_SYNC,
TIME_SYNCED
};
time_status status = tsMgr.timeSyncStatus()Then at Arduino loop cycle we can initiate any needed time sync automatically
void loop() {
// resync if needed
tsMgr.syncClockIfNeeded();
}The State Manager
It is common in process control systems to describe the actions of the machinery in the form of a state machine. The chicken coop is really no different. The coop has a door that transitions from an open and closed state. Some of the useful door states include:
STATE_OPEN
STATE_OPENING
STATE_CLOSED
STATE_CLOSING
We can initiate a door state change by passing in an event using the receive_event method for example to initiate the door opening, we would do the following:
// start the process of opening the door
stateMgr.receive_event(EV_OPEN);The state machine is easy expanded by defining new states and can be reused for other designs. For example, if we wanted to add a locking device on the door, it could be easily added by creating a few more states.
As with many of the other classes in this code we periodically call into a loop method during the Arduino loop cycle.
StateMgr stateMgr;void loop() {
...
// DO periodic updates
stateMgr.loop();
}The Schedule Manager
The Schedule manager is layered on top of the State and EEPROM manager and is the glue that is used to initiate events that occur at various times of the day. The schedule can be specified in absolute minutes after midnight or relative to sunset sunrise. Currently the schedule manager supports the following offsets:
TOD_ABSOLUTE
TOD_SUNRISE
TOD_SUNSET
TOD_CIVIL_SUNRISE
TOD_CIVIL_SUNSET
These event are not limited to door state changes, and can be expanded for other uses. Some of the schedule events include:
SE_DOOR_OPEN
SE_DOOR_CLOSE
SE_LIGHT1_ON. // chicken coop lights
SE_LIGHT1_OFF
The events are stored in persistent memory using the EEPROM manager’s store_event method. For example. If we wanted to specify that the first event is the door should open 10 minutes after sunrise we would do the following:
evtNum = 0; // first event in EEPROM
eeMgr.store_event(evtNum, SE_DOOR_OPEN, TOD_SUNRISE, 10);Or if we wanted to code the light to come on at 6:30 AM we would do:
int16_t tod = TIME_OF_DAY(6, 30)
tod_offset_t timebase = TOD_ABSOLUTE;evtNum = 1; // second event in EEPROM
eeMgr.store_event(evtNum, SE_LIGHT1_ON, timebase, tod);We then load the schedule from EEPROM.
ScheduleMgr scdMgr;scdMgr.loadSchedule();And at the loop function we process any scheduled events.
void loop() { // DO periodic updates
SavedEvent event = SE_NONE;
uint32_t when = 0; while (scdMgr.getNextEvent(&event, &when)) {
switch(event){
case SE_DOOR_OPEN:
stateMgr.receive_event(EV_OPEN);
break;
case SE_LIGHT1_ON:
// turn light on
break;
// add more events here
default: break;
}
}
}Command line interface
The coop software allows us a lot of setup options. I really didn’t want to create a cumbersome user interface, especially when I was experimenting with the design. So instead I created a simple command line interface that is fed by a serial stream. The CmdLineMgr can use the built in Serial or optionally over a remote network serial connection, ala Telnet.
CmdLineMgr cmdLineMgr;
// setup the command line with Serial In and Out
cmdLineMgr.begin(&Serial, &Serial);void loop() {
...
// DO periodic updates
cmdLineMgr.loop();
}Once setup you can use a terminal app like CoolTerm you can communicate to the coop. You can enter commands at the > prompt.
Starting Wifi on Artemis testing
External reset
ChickenCoop Shell:> help
Commands are:
SET DOOR <OPEN, CLOSE>
SET LIGHT <ON, OFF>
SET RL4 <ON, OFF>
SET SSID <"ssid name">
SET PASSWORD <"password">
SET LOCATION [lat] [long]
SET TZ <GMT offset>
SET REMOTE <OFF, TELNET, REST> [portnum]>
SET WIFI <ON,OFF,AUTO>
SET NTP <time server IP/DNS>
SET SYNC <seconds to resync>
SET USE-DST <YES/NO>
SET DISPLAY <OFF,RED,ORANGE,YELLOW,GREEN,BLUE,INIDGO,VIOLET,GREY,WHITE
SET EVENT [evtNum] <OPEN/CLOSE/L1-ON/L1-OFF/RL4-ON/RL4-OFF/RELOAD/NONE> [hh:mm] /<SR,SS,CR,CS mins>
SET TEMP-LOW [temp] <OPEN/CLOSE/L1-ON/L1-OFF/RL4-ON/RL4-OFF/RELOAD/NONE>
SET TEMP-HIGH [temp] <OPEN/CLOSE/L1-ON/L1-OFF/RL4-ON/RL4-OFF/RELOAD/NONE>
CLEAR-EEPROM
IC2-SCAN
SHOW <SCHEDULE, STATUS, NEXT, SSID, REMOTE>
WIFI <START, STOP, LIST, SSID>
REMOTE <LIST, CLOSE [portNum]>
RESTART
DATE
SYNCTo check the time you would do
> date
Thu Dec 17 2020 1:50:26pm STManually open the door
> set door openCheck the device status
> status
TIME: Thu Dec 17 2020 1:51:16pm ST
SYNC: Thu Dec 17 2020 1:34:11pm ST
UpTime: 0:04:53 hours
GMT: -8
LAT/LONG: (xxxxx,xxxxxxx)
Use DST: YES
SUNRISE: 07:03:06 am - 07:35:01 am
SUNSET: 04:40:52 pm - 05:12:47 pm
TIME SYNC: 1:00:00 hours
NTP: north-america.pool.ntp.org
WIFI: OFF
SSID: none
REMOTE: OFF
DOOR: Closed
LIGHT: OFF
TEMP: 69.12°F
Power: 32.76v -0.05mA
AC Power: ON
ENCLOSURE: OPENList the availble WIFI Access points
> wifi list
-- found 15 --
0 CHICKEN TOWN 44:d9:e7:03:33:33 -44
1 lilactime 74:31:70:f6:3c:f8 -71
2 RedLight 94:91:7f:67:40:7b -73
3 NETGEAR57 44:a5:6e:78:9f:c0 -75
4 Waluigi's Mansion 9c:3d:cf:b9:cf:b0 -76
5 mswlinksys c4:41:1e:eb:7c:36 -79
6 NETGEAR53 c4:04:15:3b:5b:68 -81
7 MySpectrumWiFi20-2G 84:a0:6e:b3:aa:26 -81
8 TP-Link_4854 70:4f:57:11:48:53 -84
9 mswlinksys c4:41:1e:eb:7e:02 -85
10 OASIS_2GEXT cc:40:d0:50:d6:55 -86
11 o Casa de Patricio-guest 66:38:e0:93:b6:7d -88
12 OASIS 10:0c:6b:f9:d5:3f -88
13 MySpectrumWiFi48-5G_EXT 58:d9:d5:47:f6:61 -89
14 Shirley's Wi-Fi Network 34:12:98:04:68:84 -91
>Select a WIFI Access point
> set ssid "CHICKEN TOWN"
> set password "Kernal Sanders"
> set wifi on
Connecting to CHICKEN TOWN
>We can use the command line to setup fairly complex events. Lets assume I wish to setup the following schedule:
reload the scheduling system at midnight
turn on the coop light at 6:00 AM
open the door at civil sunrise (cr)
turn off the light at 9:00 AM
close the door at civil sunset (cs)
we would enter the following commands:
set event 0 reload 00:00
set event 1 l1-on 06:00
set event 2 open cr
set event 3 l1-off 09:00
set event 4 close csWe can check the schedule with
> show schedule
---Event Table---
0: RELOAD 12:00am - Today 01:50 PM
1: L1 ON 06:00am - Today 01:50 PM
2: OPEN CR+0 07:03am - Today 01:50 PM
3: L1 OFF 09:00am - Today 01:50 PM
4: CLOSE CS+0 05:12pm -
---Remote command line
The coop project also has provisions to run the command line remotely using the TELNET protocol. This is handled by the TelnetPortMgr class. The telnet port manager will create a network server port with the WifiMgr and handles passing the serial stream to the command line manager class.
The TELNET protocol has been around since 1969 and has a lot of client implementations. There is some handshaking that can occur regarding terminal capabilities and so you can’t quite pass the streams directly. Most of that is handled by the libtelnet library.
TelnetPortMgr telnetPortMgr// start remote command line server on port 23
telnetPortMgr.begin(23);// stop the remote command line server
telnetPortMgr.stop();
void loop() {
// DO periodic updates
if(telnetPortMgr._running){
telnetPortMgr.loop();
}
}This can be setup from the command line with:
> set remote telnet
Remote Commandline started. 192.168.1.103 port 23Once setup you can use telnet from from your network terminal:
% telnet 192.168.1.103
Trying 192.168.1.103...
Connected to esp_98d37b.localdomain.
Escape character is '^]'.
ChickenCoop Shell:
>The downside of the TELNET protocol is that it passes the stream in cleartext, and there is no security provided. An SSH based server would be a better solution, but that would require some certificate management and it’s currently beyond the scope of this project.
RESTfull connections
As an alternative to controlling and monitoring the coop with TELNET, I have added some code to create a REST API over http. This is handled by the RESTportMgr.
This can be setup from the command line with:
> set remote rest
Remote Commandline started. 192.168.1.103 port 80At the time there are only a commands defined, but enough to write a simple IOS client. Connecting via http we can do the following:
Given the following /status/min GET request
GET /status/min HTTP/1.1
Host: 192.168.1.103
Connection: close
User-Agent: Paw/3.1.8 (Macintosh; OS X/10.15.7) GCDHTTPRequestThe reply looks like:
HTTP/1.1 200 OK
Content-Type: application/json
Content-Length: 58
Connection: keep-alive{"uptime":151,"door":"Open","light":false,"tempF":68.5625}To remotely open the door we can do a PUT to /set
PUT /set HTTP/1.1
Authorization: AWS :1ynJJjwN8bzuu8t308XhF833544=
Date: Thu, 17 Dec 2020 23:55:26 GMT
Content-Type: application/json; charset=utf-8
Host: 192.168.1.103
Connection: close
User-Agent: Paw/3.1.8 (Macintosh; OS X/10.15.7) GCDHTTPRequest
Content-Length: 13{"door":true}A successful reply will return a 204
HTTP/1.1 204 No Content
Connection: keep-alivePet the dog
I added a bit of watchdog code to the coop project to restart the system in case it stalled. This only required a slight bit of code thanks to the Artemis Watchdog Timer (WDT) . I found a useful reference to it in the Sparkfun forum..
The setup code for the WDT// Watchdog timer configuration structure.
am_hal_wdt_config_t g_sWatchdogConfig = { // Configuration values for generated watchdog timer event.
.ui32Config = AM_HAL_WDT_LFRC_CLK_16HZ | AM_HAL_WDT_ENABLE_RESET,// Number of watchdog timer ticks allowed before
// the watchdog will issue a system reset.
.ui16ResetCount = 1000 // Set WDT reset timeout for 30 seconds (480 / 16 = 15).
};// --- setup watchdog timer
// Set the clock frequency.
am_hal_clkgen_control(AM_HAL_CLKGEN_CONTROL_SYSCLK_MAX, 0);// Set the default cache configuration
am_hal_cachectrl_config(&am_hal_cachectrl_defaults);
am_hal_cachectrl_enable();// Clear reset status register for next time we reset.
am_hal_reset_control(AM_HAL_RESET_CONTROL_STATUSCLEAR, 0);// LFRC must be turned on for this example as the watchdog only runs off of the LFRC.
am_hal_clkgen_control(AM_HAL_CLKGEN_CONTROL_LFRC_START, 0);// Configure the watchdog.
am_hal_wdt_init(&g_sWatchdogConfig);// Enable the watchdog.
am_hal_wdt_start();In the main loop you reset the timer periodically
void loop() {
...
// "Pet" the dog.
am_hal_wdt_restart();
}The result of this code is that if the Artemis coop code goes off in the weeds, the timer will restart the project. You can even add some code at the beginning to figure out if you were reset by power on or the WDT
// (Note: See am_hal_reset.h for RESET status structure)
am_hal_reset_status_t sStatus;
am_hal_reset_status_get(&sStatus);
// for debugging
if(sStatus.bPORStat) DPRINTF("Power-On reset");
else if (sStatus.bEXTStat) DPRINTF("External reset");
else if (sStatus.bWDTStat) DPRINTF("Watch Dog Timer reset");
else DPRINTF ("Reset Status Register = 0x%x", sStatus.eStatus);An ongoing project
I deployed coop-project about six months ago and it has made it through the heat of the summer, fall and winter cold. I have made a few adjustments here and there. Most of it mechanical, related to the door mechanism. The slides got dirty from the chickens and the wood swelled in the rain. I needed to make more forgiving tolerances.
I wrote some test code to hammer on the REST api and suspect that maybe there could be a memory leak. But my last software update has been running for more than month without any glitches.
As part of my development I was able to unit test some of the wifi parser as well as the ESP8266 AT interface. I will try and make the Wifi test code available standalone for anyone who want to experiment with that.
All in all it was a fun project and as a reward the chickens are showing their appreciation by producing a bunch of these every day.

Source code can be found at: https://github.com/vinthewrench/Coop2